華為新專利可降低行車控制系統(tǒng)復(fù)雜度 華為公布自動駕駛行車控制專利觀點
天眼查知識產(chǎn)權(quán)信息顯示,近日,華為技術(shù)有限公司申請的“一種自動駕駛行車控制方法及裝置”專利公布。
天眼查知識產(chǎn)權(quán)信息顯示,近日,華為技術(shù)有限公司申請的“一種自動駕駛行車控制方法及裝置”專利公布。
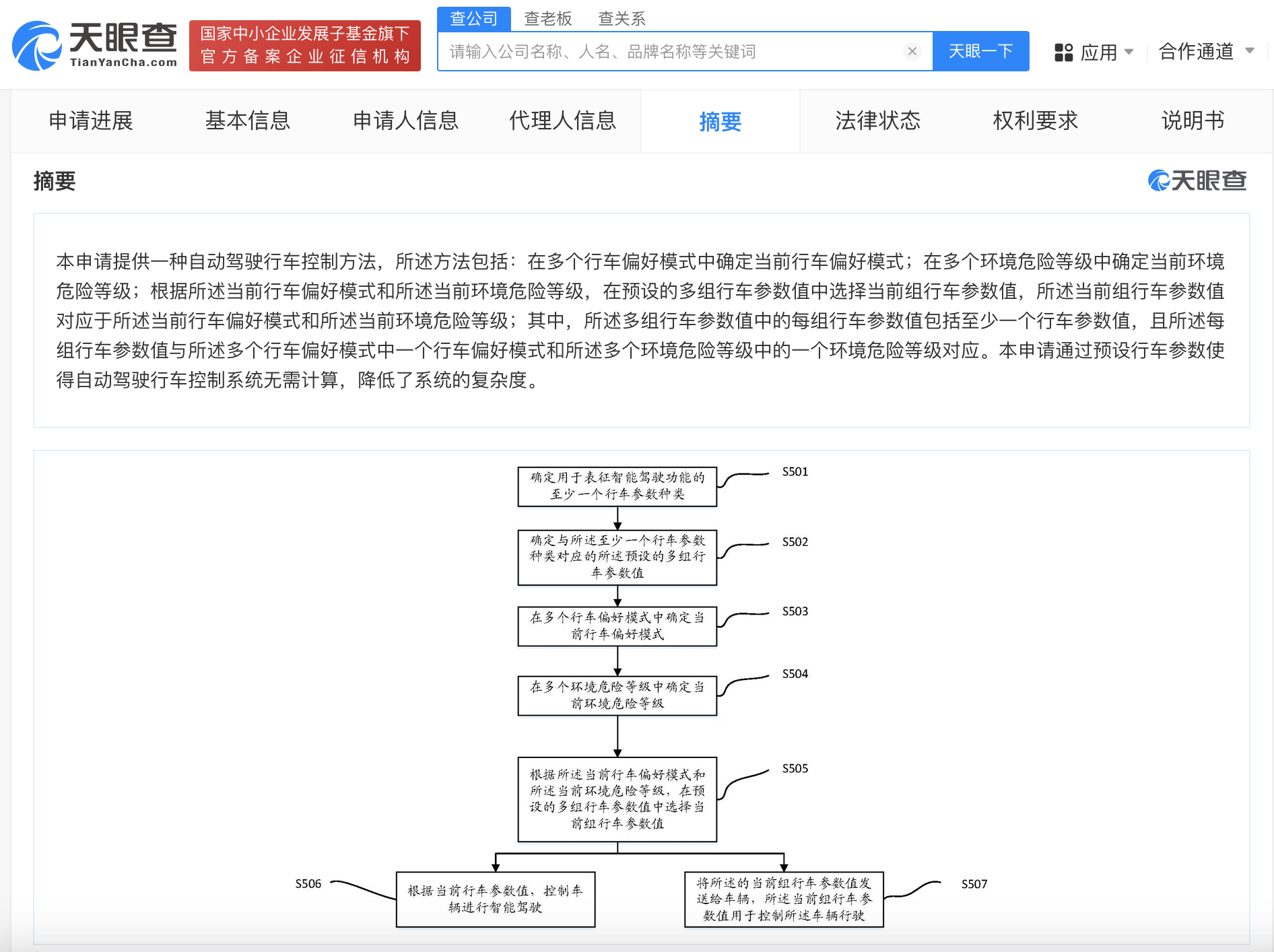
摘要顯示,該方法包括在多個行車偏好模式中確定當(dāng)前行車偏好模式;在多個環(huán)境危險等級中確定當(dāng)前環(huán)境危險等級;根據(jù)所述當(dāng)前行車偏好模式和所述當(dāng)前環(huán)境危險等級,在預(yù)設(shè)的多組行車參數(shù)值中選擇當(dāng)前組行車參數(shù)值,所述當(dāng)前組行車參數(shù)值對應(yīng)于所述當(dāng)前行車偏好模式和所述當(dāng)前環(huán)境危險等級;其中,所述多組行車參數(shù)值中的每組行車參數(shù)值包括至少一個行車參數(shù)值,且所述每組行車參數(shù)值與所述多個行車偏好模式中一個行車偏好模式和所述多個環(huán)境危險等級中的一個環(huán)境危險等級對應(yīng)。本申請通過預(yù)設(shè)行車參數(shù)使得自動駕駛行車控制系統(tǒng)無需計算,降低了系統(tǒng)的復(fù)雜度。
1.TMT觀察網(wǎng)遵循行業(yè)規(guī)范,任何轉(zhuǎn)載的稿件都會明確標(biāo)注作者和來源;
2.TMT觀察網(wǎng)的原創(chuàng)文章,請轉(zhuǎn)載時務(wù)必注明文章作者和"來源:TMT觀察網(wǎng)",不尊重原創(chuàng)的行為TMT觀察網(wǎng)或?qū)⒆肪控?zé)任;
3.作者投稿可能會經(jīng)TMT觀察網(wǎng)編輯修改或補充。
